
Part1 前言
P5649 Sone1 是一个神奇的题,用 $25$ 个字概括:
链加链赋值,最值与求和,子树加赋值,最值与求和,换根换父亲。
可以认为是一道解法很多的开放题。
Part2 重工业理论与实现细节
$\text{LCT}$ 的原理是使用 splay 维护实路径,这样可以实现平摊 $O(\log n)$ 实现链修改,链查询。
为了对虚儿子进行维护,我们应当新开一个 splay 维护虚儿子,编号为 $x+n$。
每一个父亲记录其虚儿子 splay 的根节点,注意,只有 isroot(x),$x+n$ 才有意义。
事实上,实路径和虚子树的 splay 可以共用,在实路径 splay 时,需要将原来的根节点从虚子树中删除,再将新的根节点插入,复杂度瓶颈就在此处。
这样来说,如果把虚子树根看作中儿子,这就是三度化的 $\text{SATT}$。
但我还是看不懂 $\text{SATT}$,由于找前驱后继无法平摊,所以时间为 $O(\log^2n)$。
用 $\text{SLT,splay-leafy-tree}$ 来维护虚儿子可以做到 $O(\log_2n)$ 的 access。
但这样无法共用 splay,码长要翻一倍,这也称为 $\text{AAAT}$。
重工业还有一个特点,把 tag 看作一次函数,将 dat 打包,省去了 addtag 和 pushdown 的分类讨论,进一步减小码量,当然这个也可以单纯地用矩阵乘法来理解。
具体实现要记录两个标记,表示链上修改和链外(虚子树)修改,还要记录三个数据,表示链上和,链外(虚子树)和,还有自己的值。
贴上评测链接。
Part3 从 $\text{AAAT}$ 理论到 $\text{SATT}$
显然,大多数大佬能看懂论文哥的文章。
但实现部分我是观察 AC 代码才理解的。
如果你只想学一种动态树而不愿意多做研究,那么只需要能理解 $\text{AAAT}$ 理论,那么你也能看懂 $\text{SATT}$ 的实现过程。
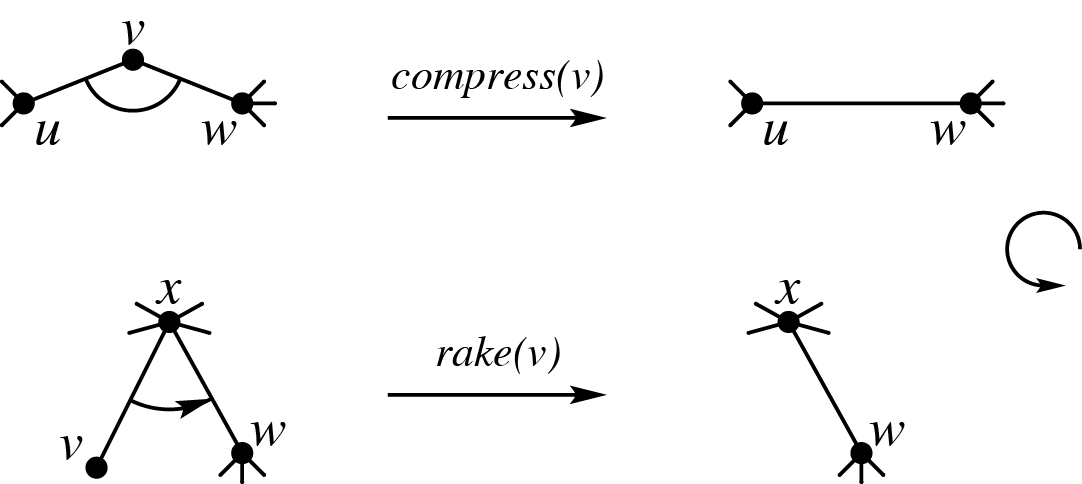
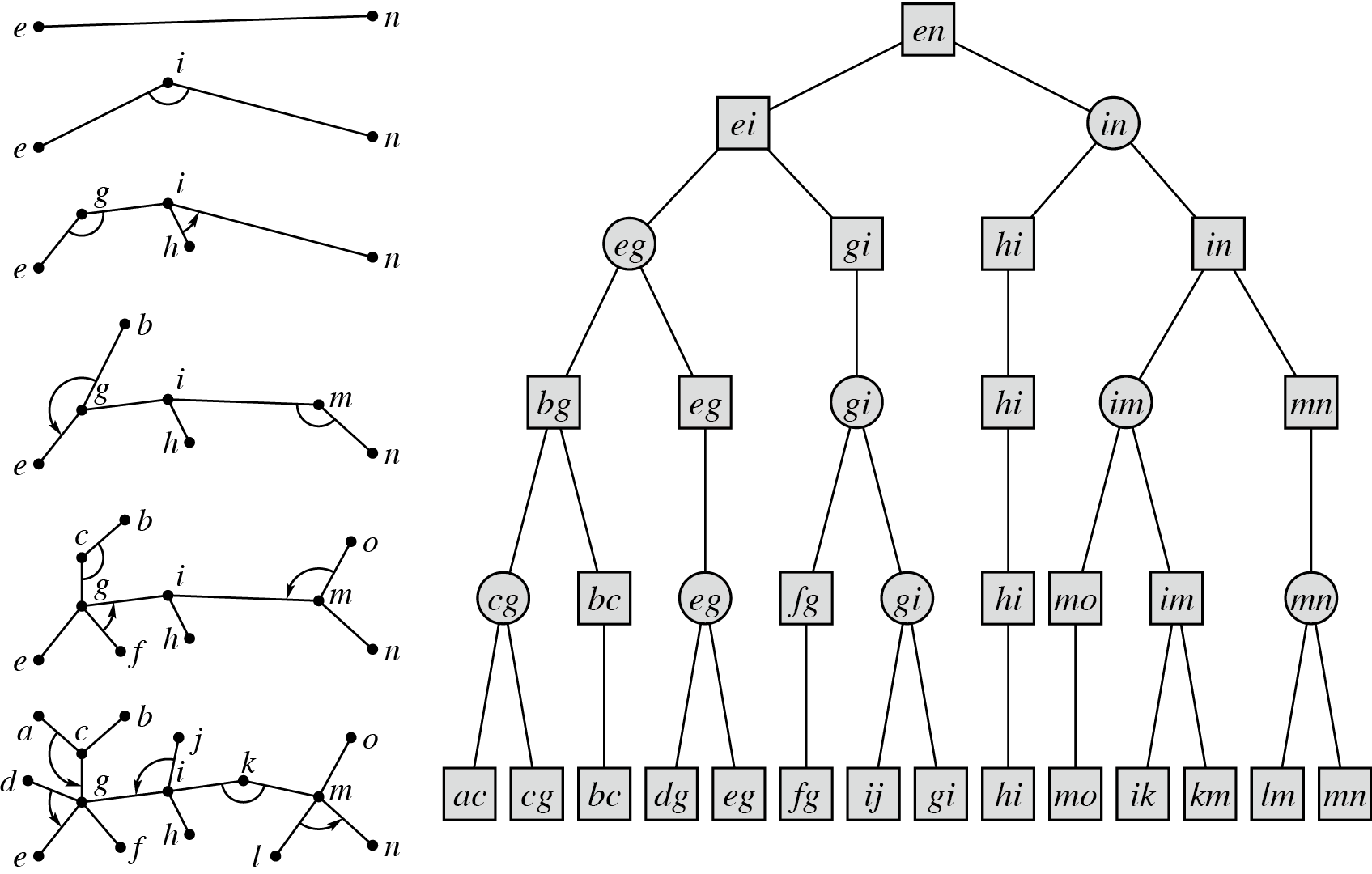
但在读下文前,请先将论文哥的文章先读三遍,可以大致理解一下 $\text{top-cluster}$ 理论。
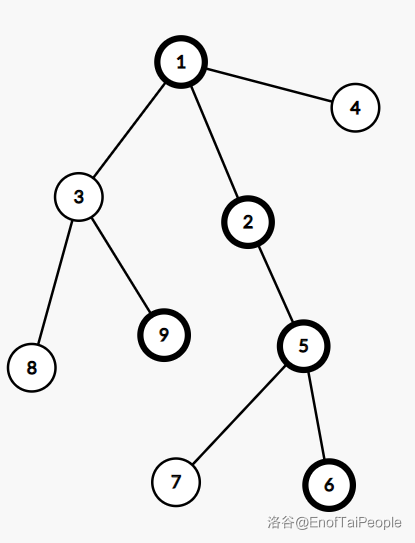
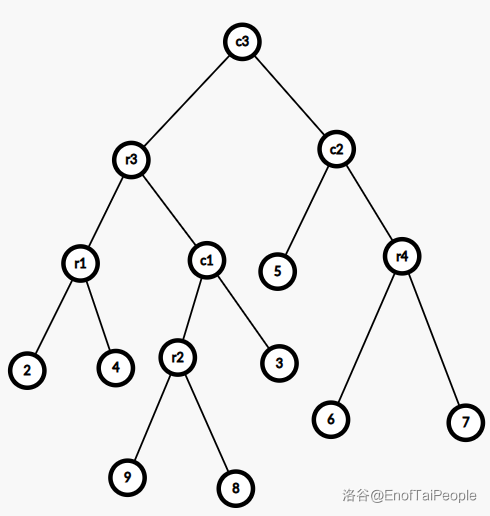
上图是一棵树,加粗的点表示实儿子,这棵树所对应的 $\text{SATT}$ 如下图:
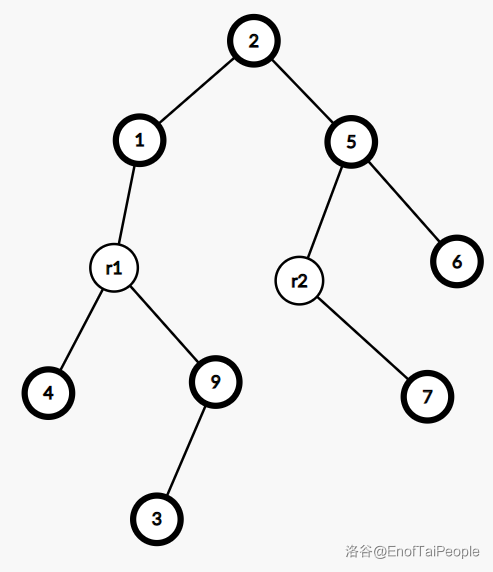
其中的 $r1,r2$ 表示 $\text{rake node}$,其余表示 $\text{compress node}$。
可以粗略理解为 $\text{compress node}$ 维护实链,$\text{rake node}$ 维护虚儿子。
但这里 $\text{rake node}$ 并没有和上方的 $\text{compress node}$ 失去联系,而成为了$\text{compress node}$ 的中儿子。
$\text{compress node}$ 在 pushdown 时需要加给子树的标记会传给中儿子。
$\text{rake node}$ 在 pushdown 时会给子树的两个标记都加上自己的标记。
注意 $\text{rake node}$ 只有一个标记,所以接受标记时也只有一个标记会用到。
可以简单理解成 $\text{rake node}$ 是维护虚子树的 $\text{SLT}$,但如果只有一个虚儿子,唯一的 $\text{rake node}$ 也会只有一个儿子。
任何时刻 $\text{rake node}$ 都不会有中儿子。
access 时只需要一次全局 pushdown,因为任何一个节点都可以一次经过 $\text{compress node}$ 和 $\text{rake node}$ 到达根簇。
遍历时只需要从根簇出发,遍历左右儿子和中儿子即可。
这样可以整体看作一棵大 splay,access 时间复杂度为均摊 $O(\log n)$。
由于只需要一次全局 pushdown,只有一棵树,常数相较 $\text{AAAT,LCT-ETT}$ 十分优秀,码量也很小。
Part4 其他做法
上面提到了两种做法是 $O(q\log^2n)$ 的:虚子树 $\text{LCT}$,$\text{LCT-ETT}$。
也有两种是 $O(q\log n)$ 的:$\text{AAAT}$ 和 $\text{SATT}$。
你会发现,它们都是基于 $\text{LCT}$ 的,所以时间复杂度都是均摊的。
假如你想要严格复杂度,甚至可持久化。
我们先考虑只要非暴力就行的方法。
注意:以下部分纯口胡,有错误可以直接指出。
- 每次打通最多增加 $O(\log n)$ 势能,所以可以每 $K$ 次操作重构,注意这里需要重链剖分建全局平衡二叉树。
- 于是重构复杂度为 $O(\dfrac{qn}K)$。
- 每次操作最多使用 $O(K\log n)$ 势能。
- 总复杂度为 $O(qK\log n+\dfrac{qn}K)$。
- 平衡一下取 $K=\sqrt{n\log n}$,总时间 $O(q\sqrt{n\log n})$。
否则你就不能使用势能了,而需要保证操作结束后保持严格重剖,具体地你需要将轻边抖落,重边连上,同时使用重量平衡树,注意这里使用 treap 做到期望复杂度会相对好写。
当然这个算法是暂时被我认为是考场不可写作的,注意 $\text{LCT}$ 和 $\text{SATT}$ 并不是。
Part5 后记
这道题可以被称作 $\text{Top Tree}$ 的简单应用,事实上静态时的 $\log$ 划分结构也是 $\text{Top Tree}$ 的良好性质,详见此文,于是这道题就真的成为 $\text{Top Tree}$ 的简单应用了。
 鄂公网安备 42010202000505 号
鄂公网安备 42010202000505 号